
Page 160 - 机械工程及自动化创新研究
P. 160
Research on Mechanical Engineering and Automation Innovation
机械工程及自动化创新研究
第二节 智能阀门设计与控制方法
一、智能阀门定位器控制系统设计
传统阀门多用手动调节,且需现场调整来适应生产要求。然而在一些操作不
方便或有害物质存在的地方,无法用手动调节。因此,研究智能阀门定位器具有
十分重要的现实意义。设计了一种基于 MSP430 的智能阀门定位器控制系统。该
系统实现了阀门控制参数的自整定,可自动设定阀门动作所必需的全部参数,包
括:阀门的零点和量程,作用方向;阀门的动作速度;参数 KP、KI、KD 的值
及死区;阀门的全开和全关时间等。该系统提高了阀门定位器的控制精度和定位
速度,具有广阔的应用前景。
(一)系统方案设计
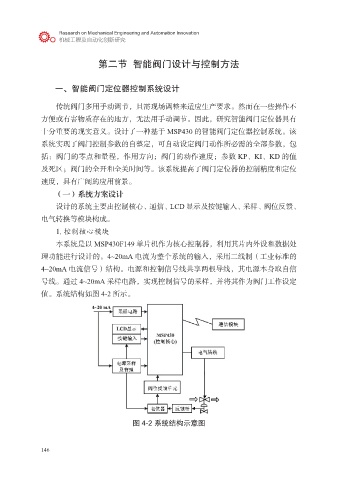
设计的系统主要由控制核心、通信、LCD 显示及按键输入、采样、阀位反馈、
电气转换等模块构成。
1. 控制核心模块
本系统是以 MSP430F149 单片机作为核心控制器,利用其片内外设和数据处
理功能进行设计的。4~20mA 电流为整个系统的输入,采用二线制(工业标准的
4~20mA 电流信号)结构。电源和控制信号线共享两根导线,其电源本身取自信
号线。通过 4~20mA 采样电路,实现控制信号的采样,并将其作为阀门工作设定
值。系统结构如图 4-2 所示。
图 4-2 系统结构示意图
146