
Page 36 - 测绘与空间地理信息研究
P. 36
Surveying and Mapping and Spatial Geographic Information Research
测绘与空间地理信息研究
仪等传感器设备,具备场景感知和路径规划的能力。大疆 M300RTK 无人机将双
目视觉和红外传感器同时引入到机身的 6 个面上,带来全六向环境感知及定位、
避障能力,并可实现对动态目标的自主识别、定位和跟踪功能。浙江大学 FAST
实验室研制出了能够实现完全自主层次化决策的飞行机器人,并获得了国际空中
机器人大赛第七代任务世界冠军。香港科技大学机器人研究所在无人机自主导航
和场景重建方面的应用也有较深的技术积累,其研制的猛禽无人机能快速自主地
穿越树林和室内复杂环境。武汉大学测绘学院重点研究了飞行测量机器人的自主
导航和自主感知技术。中国科学院沈阳自动化研究所研制的“云雀”自主飞行机
器人具备自主起降、仿地飞行、动态避障等自主功能,首次实现了中国机器人化
高海拔环境科考。2017 年,宇树科技研制了 Laikago 四足机器人,能够实现高精
度的定位导航和高速高动态步态规划与平衡控制,代表了国内四足机器人的先进
水平。百度于 2015 年推出无人驾驶汽车,并在 2018 年第一次面向中国公众开放
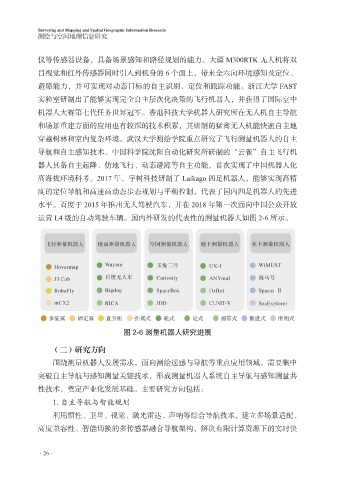
运营 L4 级的自动驾驶车辆。国内外研发的代表性的测量机器人如图 2-6 所示。
图 2-6 测量机器人研究进展
(二)研究方向
围绕测量机器人发展需求,面向测绘遥感与导航等重点应用领域,需要集中
突破自主导航与感知测量关键技术,形成测量机器人系统自主导航与感知测量共
性技术,奠定产业化发展基础。主要研究方向包括:
1. 自主导航与智能规划
利用惯性、卫星、视觉、激光雷达、声呐等综合导航技术,建立多场景适配、
高度兼容性、智能切换的多传感器融合导航架构,解决有限计算资源下的实时快
·26·