
Page 32 - 测绘与空间地理信息研究
P. 32
Surveying and Mapping and Spatial Geographic Information Research
测绘与空间地理信息研究
络经过卷积层和池化层的输出上采样到原图的大小,从而得到像素级的分类结果。
常见的上采样算法有双线性插值法、反卷积法和反池化法等。此外,针对单个像
素的预测噪声,研究者们通常使用条件随机场等方式进行平滑以提高精度。
3. 路径规划
路径规划是测量机器人自主作业过程中非常重要的一环,其主要任务是根据
测量任务需求,在静态或动态的测量区域内基于距离、能耗及安全性等指标寻找
到一条符合动力学约束且无碰撞的最优或次优路线,以确保机器人能够安全地从
起始位置到达目标位置。根据对环境先验知识获取程度的不同,路径规划主要分
为全局路径规划以及局部路径规划两类。全局路径规划是指在测量区域环境信息
保持不变且完全已知的情况下,预先规划出一条满足测量任务需求的最优路径。
由于其对先验知识的依赖,难以在未知环境以及动态环境中工作。而局部路径规
划不依赖于场景的先验信息,面向的是环境信息完全未知或者部分已知的测量场
景,其主要借助传感器获取的局部环境信息并结合一定的探索策略进行路径规划,
因此其适用范围更广。通常情况下,为了能够适应各种测量环境,测量机器人会
采用全局规划和局部规划相结合的方式进行作业,通过全局规划算法确定大致的
测量路线,同时采用局部路径规划算法对路径进行风险规避和优化提升。
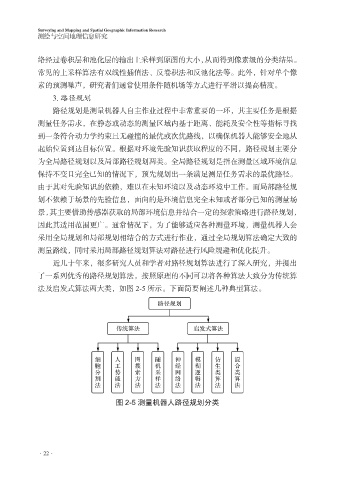
近几十年来,很多研究人员和学者对路径规划算法进行了深入研究,并提出
了一系列优秀的路径规划算法,按照原理的不同可以将各种算法大致分为传统算
法及启发式算法两大类,如图 2-5 所示。下面简要阐述几种典型算法。
图 2-5 测量机器人路径规划分类
·22·