
Page 137 - 工业机器人控制技术研究
P. 137
第四章 工业机器人的性能优化
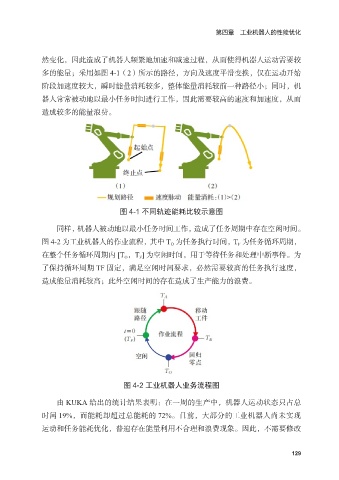
然变化,因此造成了机器人频繁地加速和减速过程,从而使得机器人运动需要较
多的能量;采用如图 4-1(2)所示的路径,方向及速度平滑变换,仅在运动开始
阶段加速度较大,瞬时能量消耗较多,整体能量消耗较前一种路径小;同时,机
器人常常被动地以最小任务时间进行工作,因此需要较高的速度和加速度,从而
造成较多的能量浪费。
图 4-1 不同轨迹能耗比较示意图
同样,机器人被动地以最小任务时间工作,造成了任务周期中存在空闲时间。
图 4-2 为工业机器人的作业流程,其中 T O 为任务执行时间,T F 为任务循环周期,
在整个任务循环周期内 [T O ,T F ] 为空闲时间,用于等待任务和处理中断事件。为
了保持循环周期 TF 固定,满足空闲时间要求,必然需要较高的任务执行速度,
造成能量消耗较高;此外空闲时间的存在造成了生产能力的浪费。
图 4-2 工业机器人业务流程图
由 KUKA 给出的统计结果表明:在一周的生产中,机器人运动状态只占总
时间 19%,而能耗却超过总能耗的 72%。目前,大部分的工业机器人尚未实现
运动和任务能耗优化,普遍存在能量利用不合理和浪费现象。因此,不需要修改
129