
Page 144 - 工业机器人控制技术研究
P. 144
R 工业机器人控制技术研究
esearch on Control Technology of Industrial Robot
(二)智能、自主的能耗最优轨迹规划
工业机器人越来越多地应用于更新周期短、形式多样、单件利润低、市场巨
大的 3C 行业。工业机器人往往通过示教方式编程,当产品更新换代时必须对其
重新示教,效率低,灵活度差,成本高。因此工业机器人应具备自主或半自主重
新规划最优轨迹的能力,通过传感系统或虚拟仿真获取当前产品及环境信息,利
用已有轨迹的信息作为基础,迅速规划出满足任务要求的能耗最优轨迹;同时可
以利用人工智能和深度学习等技术,使机器人具备自学习能力,根据环境及任务
的不同,自主地找到最适合任务的能耗优化方案。
(三)软硬件结合的整体动态优化
机器人系统是机器人及其作业对象和工作环境共同组成的整体,是一种软硬
件结合的综合机电系统,其能耗优化策略应从软件和硬件方面共同考虑。目前,
单方面的研究取得了一定的成果,但是对于整体优化的研究还相对较少且不够深
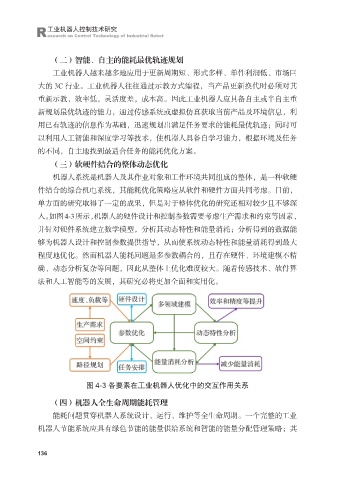
入。如图4-3所示,机器人的硬件设计和控制参数需要考虑生产需求和约束等因素,
并针对硬件系统建立数学模型,分析其动态特性和能量消耗;分析得到的数据能
够为机器人设计和控制参数提供指导,从而使系统动态特性和能量消耗得到最大
程度地优化。然而机器人能耗问题是多参数耦合的,且存在硬件、环境建模不精
确、动态分析复杂等问题,因此从整体上优化难度较大。随着传感技术、软件算
法和人工智能等的发展,其研究必将更加全面和实用化。
图 4-3 各要素在工业机器人优化中的交互作用关系
(四)机器人全生命周期能耗管理
能耗问题贯穿机器人系统设计、运行、维护等全生命周期。一个完整的工业
机器人节能系统应具有绿色节能的能量供给系统和智能的能量分配管理策略;其
136