
Page 264 - 机械制造及其自动化
P. 264
机械制造及其自动化
Mechanical Manufacturing and Its Automation
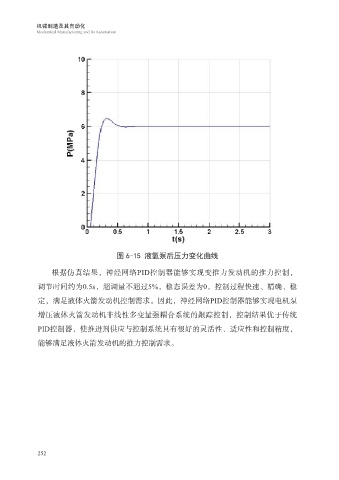
图 6-15 液氧泵后压力变化曲线
根据仿真结果,神经网络PID控制器能够实现变推力发动机的推力控制,
调节时间约为0.5s,超调量不超过5%,稳态误差为0,控制过程快速、精确、稳
定,满足液体火箭发动机控制需求。因此,神经网络PID控制器能够实现电机泵
增压液体火箭发动机非线性多变量强耦合系统的跟踪控制,控制结果优于传统
PID控制器,使推进剂供应与控制系统具有很好的灵活性、适应性和控制精度,
能够满足液体火箭发动机的推力控制需求。
252