
Page 310 - 测绘新技术的理论与实践研究
P. 310
测绘新技术的理论与实践研究
综上所述,针对大尺寸高精度的动态位姿测量问题,现有的位姿测量技术大
多局限于具体的应用环境,且姿态测量精度相对较低,缺乏有效地检测和校准手
段。这部分针对这一问题,以激光跟踪仪为主要测量仪器,通过其高精度点位坐
标测量和中低速动态跟踪测量的功能特点,在此基础上研究和实现大尺寸装备的
高精度位姿测量问题。
第二节 位姿测量理论与方法
一、各类坐标系的定义
位姿测量的应用领域非常广泛,所涉及测量对象、测量设备、工具和方法等
也不尽相同,但位姿测量过程中所使用的坐标系一般只分为三种:目标坐标系、
测量系统坐标系和测量辅助坐标系。
(一)目标坐标系
由于目标载体的多样性,其坐标系的定义方式也不尽相同。对于运动状态相
对简单的目标,其外形往往是总体对称结构设计。典型的如火箭、导弹、飞机、
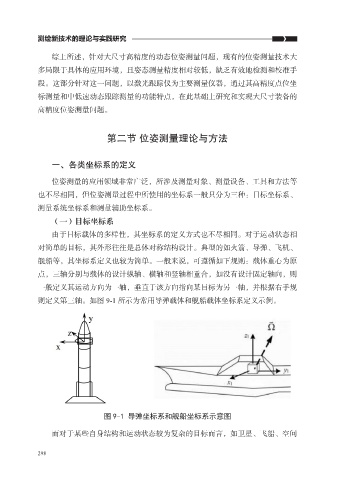
舰船等,其坐标系定义也较为简单。一般来说,可遵循如下规则:载体重心为原
点,三轴分别与载体的设计纵轴、横轴和竖轴相重合,如没有设计固定轴向,则
一般定义其运动方向为一轴,垂直于该方向指向某目标为另一轴,并根据右手规
则定义第三轴。如图 9-1 所示为常用导弹载体和舰船载体坐标系定义示例。
图 9-1 导弹坐标系和舰船坐标系示意图
而对于某些自身结构和运动状态较为复杂的目标而言,如卫星、飞船、空间
298