
Page 311 - 测绘新技术的理论与实践研究
P. 311
第九章 激光跟踪仪高精度测量技术研究
站等,其坐标系的设置则完全根据应用情况自行定义。这类目标一般含有一个基
准坐标系,由总体结构定义,并同时设计有多个核心部件,每个核心部件都有独
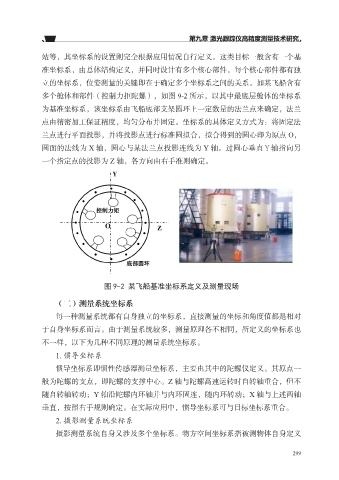
立的坐标系,位姿测量的关键即在于确定多个坐标系之间的关系。如某飞船含有
多个舱体和部件(控制力拒陀螺),如图 9-2 所示,以其中最底层舱体的坐标系
为基准坐标系,该坐标系由飞船底部支架圆环上一定数量的法兰点来确定,法兰
点由精密加工保证精度,均匀分布并固定。坐标系的具体定义方式为:将固定法
兰点进行平面投影,并将投影点进行标准圆拟合,拟合得到的圆心即为原点 O,
圆面的法线为 X 轴,圆心与某法兰点投影连线为 Y 轴。过圆心垂直¥轴指向另
一个指定点的投影为 Z 轴,各方向由右手准则确定。
图 9-2 某飞船基准坐标系定义及测量现场
(二)测量系统坐标系
每一种测量系统都有自身独立的坐标系,直接测量的坐标和角度值都是相对
于自身坐标系而言。由于测量系统较多,测量原理各不相同,所定义的坐标系也
不一样,以下为几种不同原理的测量系统坐标系。
1. 惯导坐标系
惯导坐标系即惯性传感器测量坐标系,主要由其中的陀螺仪定义。其原点一
般为陀螺的支点,即陀螺的支撑中心。Z 轴与陀螺高速运转时自转轴重合,但不
随自转轴转动;Y 轴沿陀螺内环轴并与内环固连,随内环转动;X 轴与上述两轴
垂直,按照右手规则确定。在实际应用中,惯导坐标系可与目标坐标系重合。
2. 摄影测量系统坐标系
摄影测量系统自身又涉及多个坐标系。物方空间坐标系指被测物体自身定义
299