
Page 312 - 测绘新技术的理论与实践研究
P. 312
测绘新技术的理论与实践研究
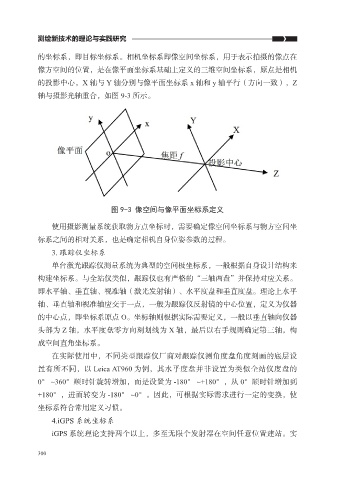
的坐标系,即目标坐标系。相机坐标系即像空间坐标系,用于表示拍摄的像点在
像方空间的位置,是在像平面坐标系基础上定义的三维空间坐标系,原点是相机
的投影中心,X 轴与 Y 轴分别与像平面坐标系 x 轴和 y 轴平行(方向一致),Z
轴与摄影光轴重合,如图 9-3 所示。
图 9-3 像空间与像平面坐标系定义
使用摄影测量系统获取物方点坐标时,需要确定像空间坐标系与物方空间坐
标系之间的相对关系,也是确定相机自身位姿参数的过程。
3. 跟踪仪坐标系
单台激光跟踪仪测量系统为典型的空间极坐标系,一般根据自身设计结构来
构建坐标系。与全站仪类似,跟踪仪也有严格的“三轴两盘”并保持对应关系。
即水平轴、垂直轴、视准轴(激光发射轴)、水平度盘和垂直度盘。理论上水平
轴、垂直轴和视准轴应交于一点,一般为跟踪仪反射镜的中心位置,定义为仪器
的中心点,即坐标系原点 O。坐标轴则根据实际需要定义,一般以垂直轴向仪器
头部为 Z 轴,水平度盘零方向刻划线为 X 轴,最后以右手规则确定第三轴,构
成空间直角坐标系。
在实际使用中,不同类型跟踪仪厂商对跟踪仪测角度盘角度刻画的底层设
置有所不同,以 Leica AT960 为例,其水平度盘并非设置为类似全站仪度盘的
0° ~360°顺时针旋转增加,而是设置为 -180° ~+180°,从 0°顺时针增加到
+180°,进而转变为 -180° ~0°。因此,可根据实际需求进行一定的变换,使
坐标系符合常用定义习惯。
4.iGPS 系统坐标系
iGPS 系统理论支持两个以上,多至无限个发射器在空间任意位置建站。实
300