
Page 104 - 当代控制理论及应用技术概论
P. 104
当代控制理论及应用技术概论
Introduction to Contemporary Control Theory and Applied Technology
器人自由度多、动力学复杂,机械臂在动作时将对基座产生干扰力矩,因此在控
制器设计时必须给予考虑。在空间机械臂的跟踪控制问题基础上,分析了机械臂
与基座之间的耦合特性和碰撞约束,考虑了外部干扰不确定、模型不确定和执行
机构饱和等情况,利用径向基神经网络对操作过程中的不确定性进行估计,在此
基础上设计了自适应终端滑模控制器,实现了机械臂和载荷的一体化控制。为了
改善基于传统神经网络的自适应控制方法在空间操控应用中的性能,提出了一种
基于量子干扰原理的新型人工神经网络,并建立了新的激活函数,通过在线学习
规则获得更快速的学习效率和更好的拟合性能,据此设计了空间操控自适应控制
器,实现了干扰的估计补偿,从而有效提升了空间操控的精度。考虑高度耦合动
力学特性和未知空间环境干扰的情况,研究了一类自由飞行的空间操作机器人的
操控问题,为了避免传统滑模控制的高频抖动特性对执行机构指向精度和使用寿
命造成的不良影响,提出了一种基于强化学习的模糊自适应滑模控制器,在实现
高精度跟踪控制的同时减少了控制器的抖动。
三、航天器智能自适应控制方法
(一)航天器智能自适应控制系统多层结构组成原理
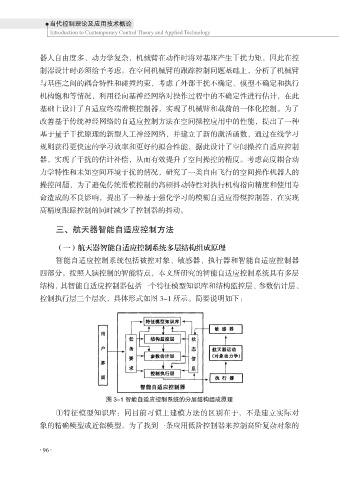
智能自适应控制系统包括被控对象、敏感器、执行器和智能自适应控制器
四部分。按照人脑控制的智能特点,本文所研究的智能自适应控制系统具有多层
结构,其智能自适应控制器包括一个特征模型知识库和结构监控层、参数估计层、
控制执行层三个层次,具体形式如图 3-1 所示。简要说明如下:
图 3-1 智能自适应控制系统的分层结构组成原理
①特征模型知识库:同目前习惯上建模方法的区别在于,不是建立实际对
象的精确模型或近似模型。为了找到一条应用低阶控制器来控制高阶复杂对象的
96
96