
Page 39 - 机电自动化在工程机械制造中的应用
P. 39
第二章 机械自动化制造系统的构建
FMS 适应性强,当工件类型发生改变时,柔性系统可以随之改变,从而提高了
设备的使用率,设备的功能也更加丰富。不论是在高校自动化类专业实训教学或
是应用在物流企业包裹智能分拣,都具有很高的使用价值。但如果采用传统的机
械手,机械结构较为复杂,且自由度少,不利于实现自动化控制;而采用气动控
制则结构简单,操作方便,响应迅速,通过 PLC 控制利于实现自动化。因此,
设计一款简单实用的气动机械手很有意义。
(三)机械手整体方案设计
此处设计的气动控制机械手由末端气爪手 1 个,旋转气缸 1 个,电感式接近
开关 2 个,磁性开关 5 个,双控电磁换向阀 4 个,缓冲阀 2 个,双出杆气缸 2 个
组成。其中,末端气爪采用二位五通电磁阀控制。即采用两个工作位置,可以随
时根据需求切换工作位置,改变气爪的工作状态,五通则指的是共有五个口可用
于进气和出气。单电控和双电控均可选择,工作原理:给电信号后,线圈得电,
电磁阀换向,电磁阀是用来控制气缸或者分割气路的,单电控靠弹簧复位,双电
控无自动复位功能。同时,为了使气路更加简化,机械手的气缸采用液压缓冲器,
省去了切换调节阀以及电磁阀的气路阻尼元件。电磁阀依据各工作气缸实际空气
流量需求调整通径的尺寸。
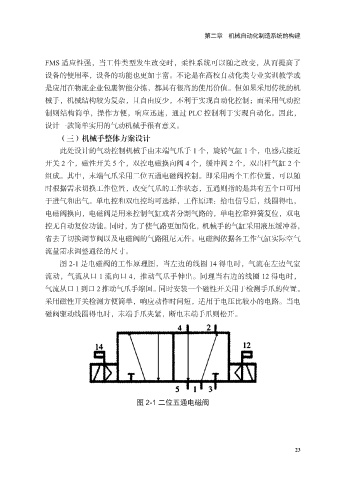
图 2-1 是电磁阀的工作原理图,当左边的线圈 14 得电时,气流在左边气室
流动,气流从口 1 流向口 4,推动气爪手伸出。同理当右边的线圈 12 得电时,
气流从口 1 到口 2 推动气爪手缩回。同时安装一个磁性开关用于检测手爪的位置。
采用磁性开关检测方便简单,响应动作时间短,适用于电压比较小的电路。当电
磁阀驱动线圈得电时,末端手爪夹紧,断电末端手爪则松开。
图 2-1 二位五通电磁阀
23