
Page 208 - 现代化工程建设技术与理论创新
P. 208
现代化工程建设技术与理论创新
Modern Engineering Construction Technology and Theoretical Innovation
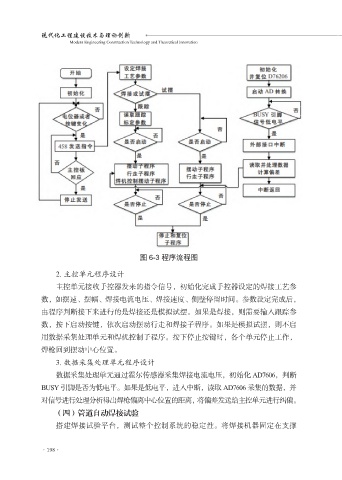
图 6-3 程序流程图
2. 主控单元程序设计
主控单元接收手控器发来的指令信号,初始化完成手控器设定的焊接工艺参
数,如摆速、摆幅、焊接电流电压、焊接速度、侧壁停留时间。参数设定完成后,
由程序判断接下来进行的是焊接还是模拟试摆。如果是焊接,则需要输入跟踪参
数,按下启动按键,依次启动摆动行走和焊接子程序。如果是模拟试摆,则不启
用数据采集处理单元和焊机控制子程序。按下停止按键时,各个单元停止工作,
焊枪回到摆动中心位置。
3. 数据采集处理单元程序设计
数据采集处理单元通过霍尔传感器采集焊接电流电压,初始化 AD7606,判断
BUSY 引脚是否为低电平。如果是低电平,进入中断,读取 AD7606 采集的数据,并
对信号进行处理分析得出焊枪偏离中心位置的距离,将偏差发送给主控单元进行纠偏。
(四)管道自动焊接试验
搭建焊接试验平台,测试整个控制系统的稳定性。将焊接机器固定在支撑
·198·