
Page 24 - 测绘与空间地理信息研究
P. 24
Surveying and Mapping and Spatial Geographic Information Research
测绘与空间地理信息研究
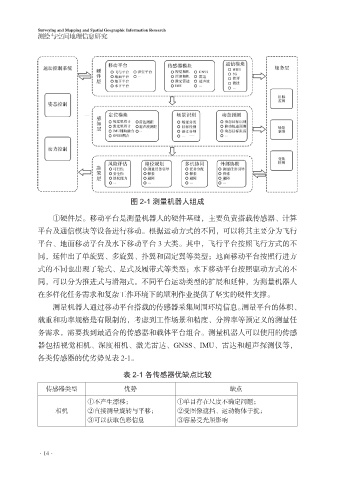
图 2-1 测量机器人组成
①硬件层。移动平台是测量机器人的硬件基础,主要负责搭载传感器、计算
平台及通信模块等设备进行移动。根据运动方式的不同,可以将其主要分为飞行
平台、地面移动平台及水下移动平台 3 大类。其中,飞行平台按照飞行方式的不
同,延伸出了单旋翼、多旋翼、扑翼和固定翼等类型;地面移动平台按照行进方
式的不同也出现了轮式、足式及履带式等类型;水下移动平台按照驱动方式的不
同,可以分为推进式与滑翔式。不同平台运动类型的扩展和延伸,为测量机器人
在多样化任务需求和复杂工作环境下的顺利作业提供了坚实的硬件支撑。
测量机器人通过移动平台搭载的传感器采集周围环境信息。测量平台的体积、
载重和功率规格是有限制的,考虑到工作场景和精度、分辨率等预定义的测量任
务需求,需要找到最适合的传感器和载体平台组合。测量机器人可以使用的传感
器包括视觉相机、深度相机、激光雷达、GNSS、IMU、雷达和超声探测仪等,
各类传感器的优劣势见表 2-1。
表 2-1 各传感器优缺点比较
传感器类型 优势 缺点
①不产生漂移; ①单目存在尺度不确定问题;
相机 ②直接测量旋转与平移; ②受图像遮挡、运动物体干扰;
③可以获取色彩信息 ③容易受光照影响
·14·