
Page 25 - 测绘与空间地理信息研究
P. 25
第二章 地面测绘技术
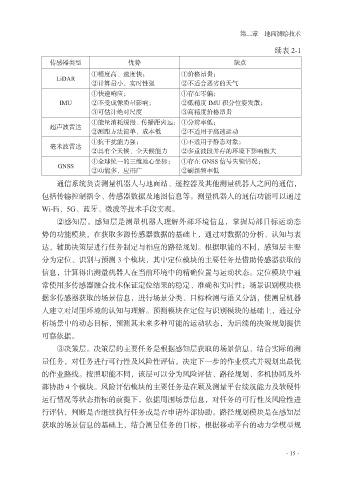
续表 2-1
传感器类型 优势 缺点
①精度高、速度快; ①价格昂贵;
LiDAR
②计算量小,实时性强 ②不适合恶劣的天气
①快速响应; ①存在零偏;
IMU ②不受成像质量影响; ②低精度 IMU 积分位姿发散;
③可估计绝对尺度 ③高精度价格昂贵
①能量消耗缓慢、传播距离远; ①分辨率低;
超声波雷达
②测距方法简单,成本低 ②不适用于高速运动
①抗干扰能力强; ①不适用于静态对象;
毫米波雷达
②具有全天候、全天候能力 ②多重波段并存的环境下影响极大
①全球统一的三维地心坐标; ①存在 GNSS 信号失锁情况;
GNSS
②功能多,应用广 ②刷新频率低
通信系统负责测量机器人与地面站、遥控器及其他测量机器人之间的通信,
包括传输控制指令、传感器数据及地图信息等。测量机器人的通信功能可以通过
Wi-Fi、5G、蓝牙、微波等技术手段实现。
②感知层。感知层是测量机器人理解外部环境信息,掌握局部目标运动态
势的功能模块,在获取多源传感器数据的基础上,通过对数据的分析、认知与表
达,辅助决策层进行任务制定与相应的路径规划。根据职能的不同,感知层主要
分为定位、识别与预测 3 个模块,其中定位模块的主要任务是借助传感器获取的
信息,计算得出测量机器人在当前环境中的精确位置与运动状态。定位模块中通
常使用多传感器融合技术保证定位结果的稳定、准确和实时性;场景识别模块根
据多传感器获取的场景信息,进行场景分类、目标检测与语义分割,使测量机器
人建立对周围环境的认知与理解。预测模块在定位与识别模块的基础上,通过分
析场景中的动态目标,预测其未来多种可能的运动状态,为后续的决策规划提供
可靠依据。
③决策层。决策层的主要任务是根据感知层获取的场景信息,结合实际的测
量任务,对任务进行可行性及风险性评估,决定下一步的作业模式并规划出最优
的作业路线。按照职能不同,该层可以分为风险评估、路径规划、多机协同及外
部协助 4 个模块。风险评估模块的主要任务是在顾及测量平台续航能力及软硬件
运行情况等状态指标的前提下,依据周围场景信息,对任务的可行性及风险性进
行评估,判断是否继续执行任务或是否申请外部协助。路径规划模块是在感知层
获取的场景信息的基础上,结合测量任务的目标,根据移动平台的动力学模型规
·15·