
Page 28 - 测绘与空间地理信息研究
P. 28
Surveying and Mapping and Spatial Geographic Information Research
测绘与空间地理信息研究
感器数据的智能处理,均是当前发展阶段正在努力攻克的技术难题,那么在有限
计算资源情况下,实现高可靠性的智能数据处理与信息提取,必须突破实时计算
困难。
(二)关键技术
测量机器人的关键技术主要有定位与建图、场景识别、路径规划和多机协同
等。其中,定位与建图技术用于确定机器人自身位姿,并建立周围环境的三维地
图;场景识别技术负责为机器人提供场景感知与理解能力;路径规划技术旨在为
机器人规划安全高效的移动测量路线;多机协同技术能够协调多台机器人共同作
业,完成测量任务。
1. 定位与建图
GNSS 技术通过无线电信号进行定位,能够确定全局坐标系下移动平台的位
置和速度,在理想情况下定位精度可以达到厘米级,被广泛地应用于机器人领域。
但是由于测量机器人工作范围存在大量 GNSS 拒止环境,因此为了实现测量机器
人在这些环境下的稳定定位,需要使用同步定位与建图(simultaneous localization
and mapping,SLAM)技术。SLAM 技术在构建环境地图的同时完成对机器人的
定位,统一了定位与建图问题。
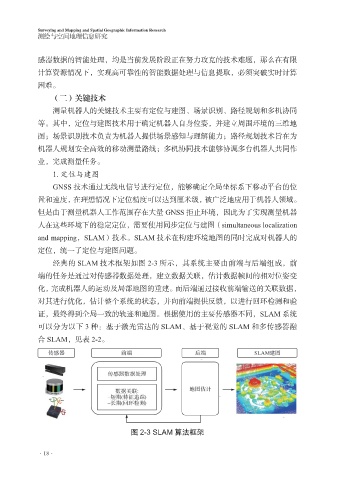
经典的 SLAM 技术框架如图 2-3 所示,其系统主要由前端与后端组成,前
端的任务是通过对传感器数据处理,建立数据关联,估计数据帧间的相对位姿变
化,完成机器人的运动及局部地图的重建。而后端通过接收前端输送的关联数据,
对其进行优化,估计整个系统的状态,并向前端提供反馈,以进行回环检测和验
证,最终得到全局一致的轨迹和地图。根据使用的主要传感器不同,SLAM 系统
可以分为以下 3 种:基于激光雷达的 SLAM、基于视觉的 SLAM 和多传感器融
合 SLAM,见表 2-2。
图 2-3 SLAM 算法框架
·18·