
Page 29 - 测绘与空间地理信息研究
P. 29
第二章 地面测绘技术
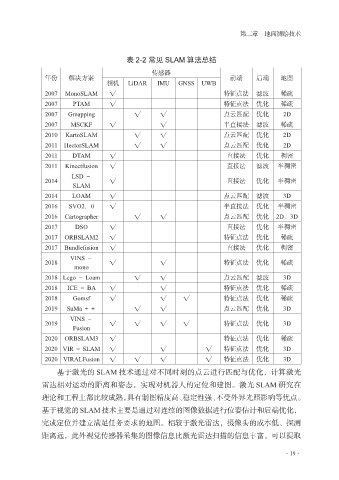
表 2-2 常见 SLAM 算法总结
传感器
年份 解决方案 前端 后端 地图
相机 LiDAR IMU GNSS UWB
2007 MonoSLAM √ 特征点法 滤波 稀疏
2007 PTAM √ 特征点法 优化 稀疏
2007 Gmapping √ √ 点云匹配 优化 2D
2007 MSCKF √ √ 半直接法 滤波 稀疏
2010 KartoSLAM √ √ 点云匹配 优化 2D
2011 HectorSLAM √ √ 点云匹配 优化 2D
2011 DTAM √ 直接法 优化 稠密
2011 Kinectfusion √ 直接法 滤波 半稠密
LSD -
2014 √ 直接法 优化 半稠密
SLAM
2014 LOAM √ 点云匹配 滤波 3D
2016 SVO2.0 √ 半直接法 优化 半稠密
2016 Cartographer √ √ 点云匹配 优化 2D、3D
2017 DSO √ 直接法 优化 半稠密
2017 ORBSLAM2 √ 特征点法 优化 稀疏
2017 Bundlefusion √ 直接法 优化 稠密
VINS -
2018 √ √ 特征点法 优化 稀疏
mono
2018 Lego - Loam √ √ 点云匹配 滤波 3D
2018 ICE - BA √ √ 特征点法 优化 稀疏
2018 Gomsf √ √ √ 特征点法 优化 稀疏
2019 SuMa ++ √ √ 点云匹配 优化 3D
VINS -
2019 √ √ √ √ 特征点法 优化 3D
Fusion
2020 ORBSLAM3 √ 特征点法 优化 稀疏
2020 VIR - SLAM √ √ √ 特征点法 优化 3D
2020 VIRALFusion √ √ √ √ 特征点法 优化 3D
基于激光的 SLAM 技术通过对不同时刻的点云进行匹配与优化,计算激光
雷达相对运动的距离和姿态,实现对机器人的定位和建图。激光 SLAM 研究在
理论和工程上都比较成熟,具有制图精度高、稳定性强、不受外界光照影响等优点。
基于视觉的 SLAM 技术主要是通过对连续的图像数据进行位姿估计和后端优化,
完成定位并建立满足任务要求的地图。相较于激光雷达,摄像头的成本低、探测
距离远,此外视觉传感器采集的图像信息比激光雷达扫描的信息丰富,可以提取
·19·