
Page 88 - 测绘与空间地理信息研究
P. 88
Surveying and Mapping and Spatial Geographic Information Research
测绘与空间地理信息研究
(二)技术原理
机载 LiDAR 系统能够精确定位激光束照射在物体上的光斑,获取准确的地
形三维数据。设置激光器的高度和扫描角度,通过激光器位置坐标和惯导系统的
发射方向,可以推算出地面光斑每个位置的 X、Y、Z 坐标值。
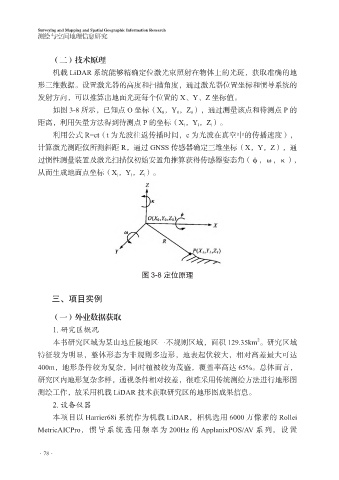
如图 3-8 所示,已知点 O 坐标(X 0 ,Y 0 ,Z 0 ),通过测量该点和待测点 P 的
距离,利用矢量方法得到待测点 P 的坐标(X i ,Y i ,Z i )。
利用公式 R=ct(t 为光波往返传播时间,c 为光波在真空中的传播速度),
计算激光测距仪所测斜距 R,通过 GNSS 传感器确定三维坐标(X,Y,Z),通
过惯性测量装置及激光扫描仪初始安置角推算获得传感器姿态角(φ,ω,κ),
从而生成地面点坐标(X i ,Y i ,Z i )。
图 3-8 定位原理
三、项目实例
(一)外业数据获取
1. 研究区概况
2
本书研究区域为某山地丘陵地区一不规则区域,面积 129.35km 。研究区域
特征较为明显,整体形态为非规则多边形,地表起伏较大,相对高差最大可达
400m,地形条件较为复杂,同时植被较为茂盛,覆盖率高达 65%。总体而言,
研究区内地形复杂多样,通视条件相对较差,很难采用传统测绘方法进行地形图
测绘工作,故采用机载 LiDAR 技术获取研究区的地形图成果信息。
2. 设备仪器
本项目以 Harrier68i 系统作为机载 LiDAR,相机选用 6000 万像素的 Rollei
MetricAICPro, 惯导系 统选用频 率为 200Hz 的 ApplanixPOS/AV 系列,设 置
·78·