
Page 91 - 测绘与空间地理信息研究
P. 91
第三章 空间测量技术
限度时,需对其进行分段处理。
(3)三维点云数据
将所获得的激光扫描数据、POS 数据、地面参考基准站数据进行联合解算,
生成可以被解析处理的三维点云数据,以测区平面和高程控制点对其进行误差校
正,结果即为地物三维点云数据。
2. 点云滤波及分类
在点云分类前,需对点云数据进行滤波处理,即通过一定的方式将明显低于
或高于地面的点云进行过滤处理,提高点云数据精度,为后续点云分类做铺垫,
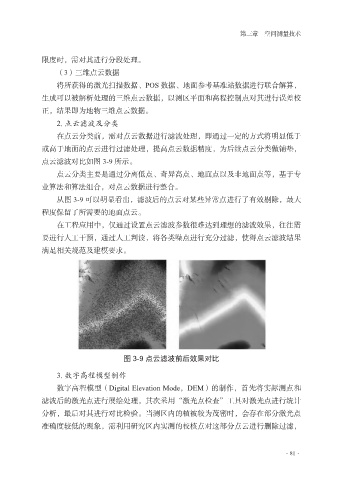
点云滤波对比如图 3-9 所示。
点云分类主要是通过分离低点、奇异高点、地面点以及非地面点等,基于专
业算法和算法组合,对点云数据进行整合。
从图 3-9 可以明显看出,滤波后的点云对某些异常点进行了有效剔除,最大
程度保留了所需要的地面点云。
在工程应用中,仅通过设置点云滤波参数很难达到理想的滤波效果,往往需
要进行人工干预,通过人工判读,将各类噪点进行充分过滤,使得点云滤波结果
满足相关规范及建模要求。
图 3-9 点云滤波前后效果对比
3. 数字高程模型制作
数字高程模型(Digital Elevation Mode,DEM)的制作,首先将实际测点和
滤波后的激光点进行展绘处理,其次采用“激光点检查”工具对激光点进行统计
分析,最后对其进行对比检验。当测区内的植被较为茂密时,会存在部分激光点
准确度较低的现象,需利用研究区内实测的校核点对这部分点云进行删除过滤,
·81·