
Page 207 - 现代测绘技术在水利工程中的应用
P. 207
The Application of Modern Surveying and Mapping Technology in Water Conservancy Engineering
现代测绘技术在水利工程中的应用
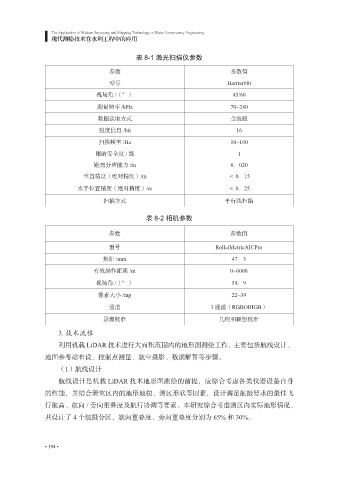
表 8-1 激光扫描仪参数
参数 参数值
型号 Harrier68i
视场角 /(°) 45/60
测量频率 /kHz 70~240
数据获取方式 全波段
强度信息 /bit 16
扫描频率 /Hz 10~160
眼睛安全度 / 级 1
距离分辨能力 /m 0.020
垂直精度(绝对精度)/m < 0.15
水平位置精度(绝对精度)/m < 0.25
扫描方式 平行线扫描
表 8-2 相机参数
参数 参数值
型号 RolleiMetricAICPro
焦距 /mm 47.3
有效操作距离 /m 0~6000
视场角 /(°) 54.9
像素大小 /mp 22~39
通道 3 通道(RGBORIGB)
影像校准 几何和辐射校准
3. 技术流程
利用机载 LiDAR 技术进行大面积范围内的地形图测绘工作,主要包括航线设计、
地面参考站布设、控制点测量、航空摄影、数据解算等步骤。
(1)航线设计
航线设计是机载 LiDAR 技术地形图测绘的前提,应综合考虑各类仪器设备自身
的性能,并结合研究区内的地形地貌、测区形状等因素,设计满足航摄要求的最佳飞
行航高、航向 / 旁向重叠度及航行协调等要素。本研究综合考虑测区内实际地形情况,
共设计了 4 个航摄分区,航向重叠度、旁向重叠度分别为 65% 和 30%。
• 194 •