
Page 30 - 测绘与空间地理信息研究
P. 30
Surveying and Mapping and Spatial Geographic Information Research
测绘与空间地理信息研究
目标纹理信息,有利于后期处理。但是,无论从适用场景、累计误差还是定位和
建图精度等问题,激光和视觉传感器的单独使用都存在其局限性。基于多传感器
融合的 SLAM 算法,利用卡尔曼滤波或图优化等技术对不同传感器的数据进行
结合,实现多传感器之间的优势互补。常见的融合算法可以分为松耦合和紧耦合
两大类。松耦合是指各传感器分别进行自身估计,然后对其位姿估计结果融合。
相较于松耦合算法,紧耦合将各传感器的状态合并,共同构建观测和运动模型,
消除了直接在位姿层面融合造成的信息损失,可以实现更高的定位和建图精度。
因此,基于紧耦合的融合算法是目前多传感器 SLAM 研究的主流方向。
此外,随着深度学习技术的发展,其在特征提取、动态物体识别、观测值相
似度计算等方面展现出的优势开始在 SLAM 研究领域受到重视。将深度学习技
术应用于 SLAM 里程计、闭环检测或语义建图中的一个或多个环节,提高系统
的准确率、计算效率及稳健性,已成为定位与制图技术的一大发展方向。
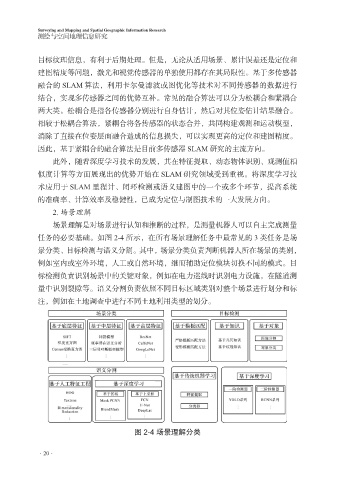
2. 场景理解
场景理解是对场景进行认知和推断的过程,是测量机器人可以自主完成测量
任务的必要基础。如图 2-4 所示,在所有场景理解任务中最常见的 3 类任务是场
景分类、目标检测与语义分割。其中,场景分类负责判断机器人所在场景的类别,
例如室内或室外环境,人工或自然环境,继而辅助定位模块切换不同的模式。目
标检测负责识别场景中的关键对象,例如在电力巡线时识别电力设施,在隧道测
量中识别裂隙等。语义分割负责依照不同目标区域类别对整个场景进行划分和标
注,例如在土地调查中进行不同土地利用类型的划分。
图 2-4 场景理解分类
·20·