
Page 324 - 测绘新技术的理论与实践研究
P. 324
测绘新技术的理论与实践研究
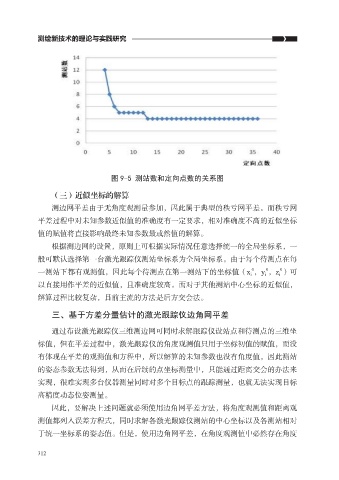
图 9-5 测站数和定向点数的关系图
(三)近似坐标的解算
测边网平差由于无角度观测量参加,因此属于典型的秩亏网平差。而秩亏网
平差过程中对未知参数近似值的准确度有一定要求,相对准确度不高的近似坐标
值的赋值将直接影响最终未知参数最或然值的解算。
根据测边网的设置,原则上可根据实际情况任意选择统一的全局坐标系,一
般可默认选择第一台激光跟踪仪测站坐标系为全局坐标系。由于每个待测点在每
0
0
0
一测站下都有观测值,因此每个待测点在第一测站下的坐标值(x i ,y i ,z i )可
以直接用作平差的近似值,且准确度较高。而对于其他测站中心坐标的近似值,
解算过程比较复杂,目前主流的方法是后方交会法。
三、基于方差分量估计的激光跟踪仪边角网平差
通过布设激光跟踪仪三维测边网可同时求解跟踪仪设站点和待测点的三维坐
标值,但在平差过程中,激光跟踪仪的角度观测值只用于坐标初值的赋值,而没
有体现在平差的观测值和方程中,所以解算的未知参数也没有角度值,因此测站
的姿态参数无法得到,从而在后续的点坐标测量中,只能通过距离交会的办法来
实现,很难实现多台仪器测量同时对多个目标点的跟踪测量,也就无法实现目标
高精度动态位姿测量。
因此,要解决上述问题就必须使用边角网平差方法,将角度观测值和距离观
测值都列入误差方程式,同时求解各激光跟踪仪测站的中心坐标以及各测站相对
于统一坐标系的姿态值。但是,使用边角网平差,在角度观测值中必然存在角度
312