
Page 250 - 机械制造及其自动化
P. 250
机械制造及其自动化
Mechanical Manufacturing and Its Automation
(三)机器人工作站软件系统编程
1.PLC编程实现升降台A、B动作要求
驱动部分使用步进驱动器,连接PLC的I/O信号,在PLC中编程完成脉冲
设置。设置步进驱动器的拨码为01110111,设置步进驱动器的锁机电流大小为
1.04A,设置细分表为400,主要用于位移脉冲控制。在PLC中通过寻找原点,绝
对位移以及相对位移完成升降台的运动距离,经现场多次测定每一个物料盒上升
的脉冲数为从原点位置往上运动脉冲为2500,此数据根据多次测量所得的理想脉
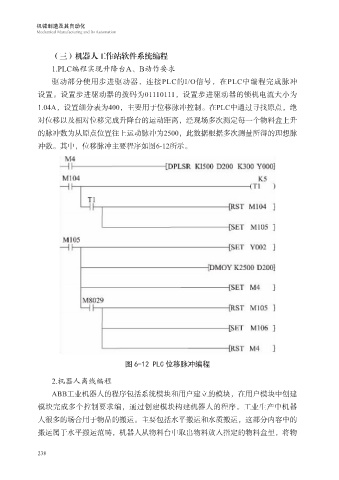
冲数。其中,位移脉冲主要程序如图6-12所示。
图 6-12 PLC 位移脉冲编程
2.机器人离线编程
ABB工业机器人的程序包括系统模块和用户建立的模块,在用户模块中创建
模块完成多个控制要求编,通过创建模块构建机器人的程序。工业生产中机器
人很多的场合用于物品的搬运。主要包括水平搬运和水质搬运,这部分内容中的
搬运属于水平搬运范畴,机器人从物料台中取出物料放入指定的物料盒里,将物
238