
Page 246 - 机械制造及其自动化
P. 246
机械制造及其自动化
Mechanical Manufacturing and Its Automation
1.系统总体设计
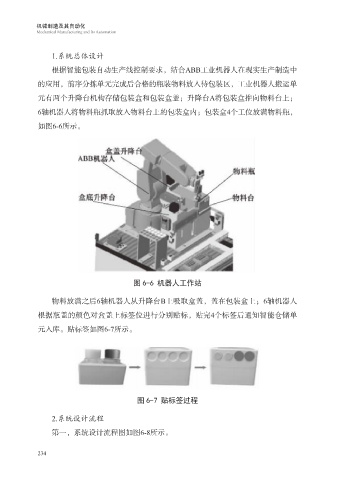
根据智能包装自动生产线控制要求,结合ABB工业机器人在现实生产制造中
的应用,前序分拣单元完成后合格的瓶装物料放入待包装区,工业机器人搬运单
元有两个升降台机构存储包装盒和包装盒盖;升降台A将包装盒推向物料台上;
6轴机器人将物料瓶抓取放入物料台上的包装盒内;包装盒4个工位放满物料瓶,
如图6-6所示。
图 6-6 机器人工作站
物料放满之后6轴机器人从升降台B上吸取盒盖,盖在包装盒上;6轴机器人
根据瓶盖的颜色对盒盖上标签位进行分别贴标,贴完4个标签后通知智能仓储单
元入库。贴标签如图6-7所示。
图 6-7 贴标签过程
2.系统设计流程
第一,系统设计流程图如图6-8所示。
234