
Page 249 - 机械制造及其自动化
P. 249
第六章 工业智能化机械的技术与应用
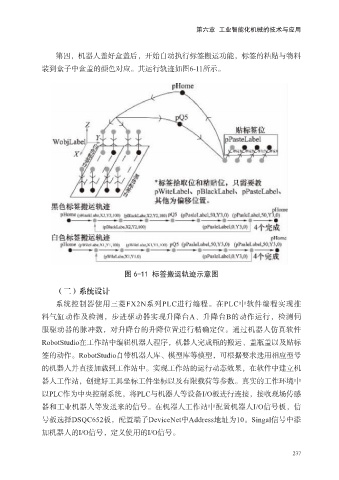
第四,机器人盖好盒盖后,开始自动执行标签搬运功能,标签的粘贴与物料
装到盒子中盒盖的颜色对应。其运行轨迹如图6-11所示。
图 6-11 标签搬运轨迹示意图
(二)系统设计
系统控制器使用三菱FX2N系列PLC进行编程。在PLC中软件编程实现推
料气缸动作及检测,步进驱动器实现升降台A、升降台B的动作运行,检测伺
服驱动器的脉冲数,对升降台的升降位置进行精确定位。通过机器人仿真软件
RobotStudio在工作站中编辑机器人程序,机器人完成瓶的搬运、盖瓶盖以及贴标
签的动作。RobotStudio自带机器人库、模型库等模型,可根据要求选用相应型号
的机器人并直接加载到工作站中。实现工作站的运行动态效果,在软件中建立机
器人工作站,创建好工具坐标工件坐标以及有限载荷等参数。真实的工作环境中
以PLC作为中央控制系统,将PLC与机器人等设备I/O板进行连接,接收现场传感
器和工业机器人等发送来的信号。在机器人工作站中配置机器人I/O信号板,信
号板选择DSQC652板,配置端子DeviceNet中Address地址为10。Singal信号中添
加机器人的I/O信号,定义使用的I/O信号。
237