
Page 247 - 机械制造及其自动化
P. 247
第六章 工业智能化机械的技术与应用
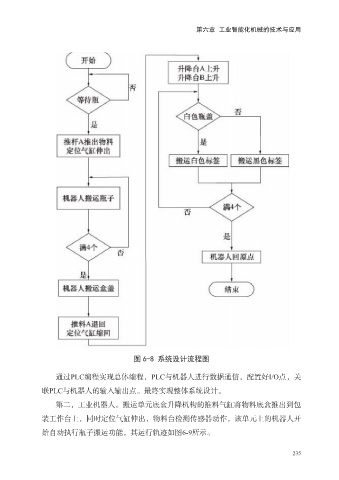
图 6-8 系统设计流程图
通过PLC编程实现总体编程,PLC与机器人进行数据通信,配置好I/O点,关
联PLC与机器人的输入输出点。最终实现整体系统设计。
第二,工业机器人。搬运单元底盒升降机构的推料气缸将物料底盒推出到包
装工作台上,同时定位气缸伸出,物料台检测传感器动作,该单元上的机器人开
始自动执行瓶子搬运功能,其运行轨迹如图6-9所示。
235