
Page 98 - 机械制造及其自动化
P. 98
机械制造及其自动化
Mechanical Manufacturing and Its Automation
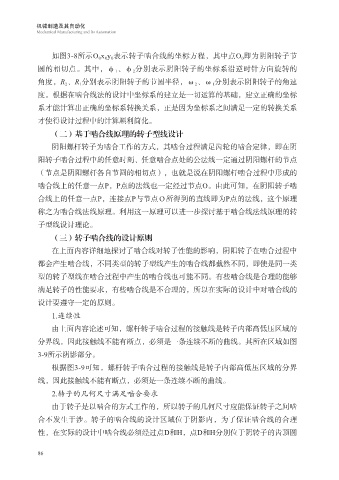
如图3-8所示O 0 x 0 y 0 表示转子啮合线的坐标方程,其中点O 0 即为阴阳转子节
圆的相切点。其中,φ 1 、φ 2 分别表示阴阳转子的坐标系沿逆时针方向旋转的
角度,R 、R 分别表示阴阳转子的节圆半径,ω 2 、ω 1 分别表示阴阳转子的角速
2
1
度。根据在啮合线法的设计中坐标系的建立是一切运算的基础,建立正确的坐标
系才能计算出正确的坐标系转换关系,正是因为坐标系之间满足一定的转换关系
才使得设计过程中的计算顺利简化。
(二)基于啮合线原理的转子型线设计
阴阳螺杆转子为啮合工作的方式,其啮合过程满足齿轮的啮合定律,即在阴
阳转子啮合过程中的任意时刻、任意啮合点处的公法线一定通过阴阳螺杆的节点
(节点是阴阳螺杆各自节圆的相切点),也就是说在阴阳螺杆啮合过程中形成的
啮合线上的任意一点P,P点的法线也一定经过节点O。由此可知,在阴阳转子啮
合线上的任意一点P,连接点P与节点О所得到的直线即为P点的法线,这个原理
称之为啮合线法线原理。利用这一原理可以进一步探讨基于啮合线法线原理的转
子型线设计理论。
(三)转子啮合线的设计原则
在上面内容详细地探讨了啮合线对转子性能的影响,阴阳转子在啮合过程中
都会产生啮合线,不同类型的转子型线产生的啮合线都截然不同,即使是同一类
型的转子型线在啮合过程中产生的啮合线也可能不同。有些啮合线是合理的能够
满足转子的性能要求,有些啮合线是不合理的,所以在实际的设计中对啮合线的
设计要遵守一定的原则。
1.连续性
由上面内容论述可知,螺杆转子啮合过程的接触线是转子内部高低压区域的
分界线,因此接触线不能有断点,必须是一条连续不断的曲线。其所在区域如图
3-9所示阴影部分。
根据图3-9可知,螺杆转子啮合过程的接触线是转子内部高低压区域的分界
线,因此接触线不能有断点,必须是一条连续不断的曲线。
2.转子的几何尺寸满足啮合要求
由于转子是以啮合的方式工作的,所以转子的几何尺寸应能保证转子之间啮
合不发生干涉。转子的啮合线的设计区域位于阴影内,为了保证啮合线的合理
性,在实际的设计中啮合线必须经过点D和H,点D和H分别位于阴转子的齿顶圆
86