
Page 97 - 机械制造及其自动化
P. 97
第三章 空气压缩机的设计与优化改进研究
以上所求的曲线组我们可以通过阴阳转子动坐标系O 1 x 1 y 1 、O 2 x 2 y 2 之间的变换
关系求得曲线参数方程:
x 2 = x 2 ( ) t
(3-13)
y
2 = y 2 ( ) t
x = x ( ,ϕt )
1 1 1
) (3-14)
y
1 = y 1 ( ,ϕt 1
式中:t—表示阴转子参数方程变量;
φ 1 —为曲线组中任意一条曲线的位置参数或者阴转子齿曲线转动的
角度,rad。
当转子啮合满足啮合定律时,包络线与曲线组中的任意一条曲线都有切点,
所以每一个参数t与转角参数φ 1 是一一对应的。由此我们可以得到包络条件为
φ 1 =φ 1 (t)。
三、转子型线的综合方法与设计
(一)啮合线坐标系的建立
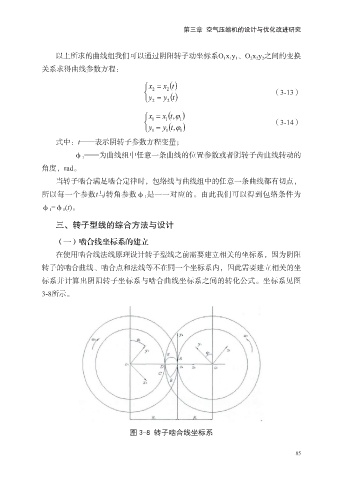
在使用啮合线法线原理设计转子型线之前需要建立相关的坐标系,因为阴阳
转子的啮合曲线、啮合点和法线等不在同一个坐标系内,因此需要建立相关的坐
标系并计算出阴阳转子坐标系与啮合曲线坐标系之间的转化公式。坐标系见图
3-8所示。
图 3-8 转子啮合线坐标系
85