
Page 99 - 机械制造及其自动化
P. 99
第三章 空气压缩机的设计与优化改进研究
上和阳转子的齿根圆上,由此可以推断,如果要保证转子啮合线的合理性,出现
得比较圆与其啮合的转子的齿根圆相切。
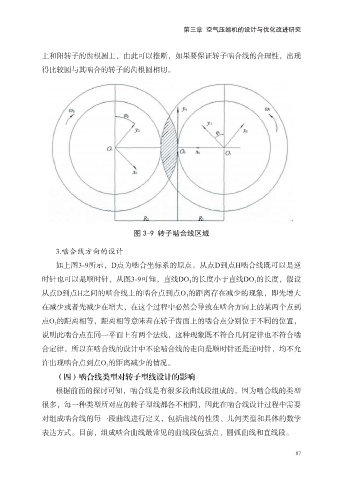
图 3-9 转子啮合线区域
3.啮合线方向的设计
如上图3-9所示,D点为啮合坐标系的原点。从点D到点H啮合线既可以是逆
时针也可以是顺时针,从图3-9可知,直线DO 1 的长度小于直线DO 1 的长度,假设
从点D到点H之间的啮合线上的啮合点到点O 1 的距离存在减少的现象,即先增大
在减少或者先减少在增大,在这个过程中必然会导致在啮合方向上的某两个点到
点O 1 的距离相等,距离相等意味着在转子齿面上的啮合点分别位于不同的位置,
说明此啮合点在同一平面上有两个法线,这种现象既不符合几何定律也不符合啮
合定律,所以在啮合线的设计中不论啮合线的走向是顺时针还是逆时针,均不允
许出现啮合点到点O 1 的距离减少的情况。
(四)啮合线类型对转子型线设计的影响
根据前面的探讨可知,啮合线是有很多段曲线段组成的,因为啮合线的类型
很多,每一种类型所对应的转子型线都各不相同,因此在啮合线设计过程中需要
对组成啮合线的每一段曲线进行定义,包括曲线的性质、几何类型和具体的数学
表达方式。目前,组成啮合曲线最常见的曲线段包括点、圆弧曲线和直线段。
87