
Page 94 - 机械制造及其自动化
P. 94
机械制造及其自动化
Mechanical Manufacturing and Its Automation
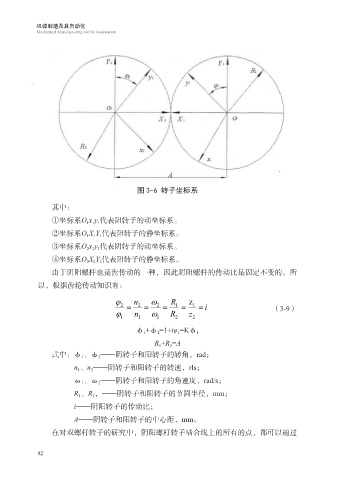
图 3-6 转子坐标系
其中:
①坐标系O x y 代表阳转子的动坐标系。
1 1 1
②坐标系O X Y 代表阳转子的静坐标系。
1 1
1
③坐标系O x y 代表阴转子的动坐标系。
2 2 2
④坐标系O X Y 代表阳转子的静坐标系。
2
2 2
由于阴阳螺杆也是齿传动的一种,因此阴阳螺杆的传动比是固定不变的。所
以,根据齿轮传动知识有:
ϕ 2 = n 2 = ω 2 = R 1 = z 1 = i
ϕ n 1 ω 1 R 2 z 2 (3-9)
1
φ 1 +φ 2 =1+iφ =Kφ 1
1
R +R =A
2
1
式中:φ 1 、φ 2 —阴转子和阳转子的转角,rad;
n 、n —阴转子和阳转子的转速,rls;
1
2
ω 1 、ω 2 —阴转子和阳转子的角速度,rad/s;
R 、R ,—阴转子和阳转子的节圆半径,mm;
1
2
i—阴阳转子的传动比;
A—阴转子和阳转子的中心距,mm。
在对双螺杆转子的研究中,阴阳螺杆转子啮合线上的所有的点,都可以通过
82