
Page 17 - 当代控制理论及应用技术概论
P. 17
第一章 控制理论概述
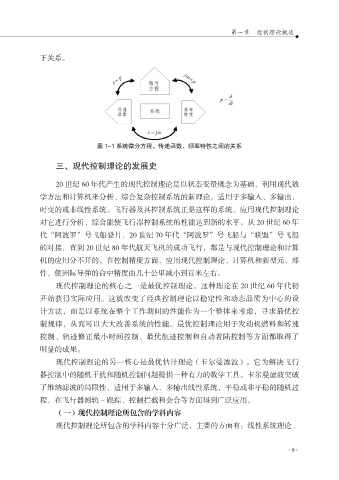
下关系。
图 1-1 系统微分方程、传递函数、频率特性之间的关系
三、现代控制理论的发展史
20 世纪 60 年代产生的现代控制理论是以状态变量概念为基础,利用现代数
学方法和计算机来分析、综合复杂控制系统的新理论,适用于多输入、多输出,
时变的或非线性系统。飞行器及其控制系统正是这样的系统。应用现代控制理论
对它进行分析、综合能使飞行器控制系统的性能达到新的水平。从 20 世纪 60 年
代“阿波罗”号飞船登月,20 世纪 70 年代“阿波罗”号飞船与“联盟”号飞船
的对接,直到 20 世纪 80 年代航天飞机的成功飞行,都是与现代控制理论和计算
机的应用分不开的。在控制精度方面,应用现代控制理论、计算机和新型元、部
件,使洲际导弹的命中精度由几十公里减小到百米左右。
现代控制理论的核心之一是最优控制理论。这种理论在 20 世纪 60 年代初
开始获得实际应用。这就改变了经典控制理论以稳定性和动态品质为中心的设
计方法,而是以系统在整个工作期间的性能作为一个整体来考虑,寻求最优控
制规律,从而可以大大改善系统的性能。最优控制理论用于发动机燃料和转速
控制、轨迹修正最小时间控制、最优航迹控制和自动着陆控制等方面都取得了
明显的成果。
现代控制理论的另一核心是最优估计理论(卡尔曼滤波)。它为解决飞行
器控制中的随机干扰和随机控制问题提供一种有力的数学工具。卡尔曼滤波突破
了维纳滤波的局限性,适用于多输入、多输出线性系统,平稳或非平稳的随机过
程,在飞行器测轨 - 跟踪、控制拦截和会合等方面得到广泛应用。
(一)现代控制理论所包含的学科内容
现代控制理论所包含的学科内容十分广泛,主要的方面有:线性系统理论、
9
9