
Page 37 - 机电技术运用及管理探究
P. 37
第一章 现代电机控制技术研究
被自锁在这个位置上,此时,B,C 两相的定子齿则和转子齿在不同方向各错开
30°。随后,如果 A 相断电,B 相控制绕组通电,则转子齿就和 B 相定子齿对齐,
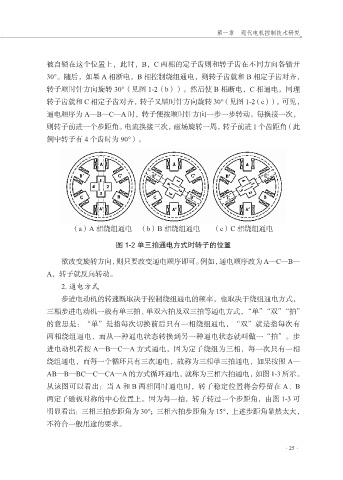
转子顺时针方向旋转 30°(见图 1-2(b))。然后使 B 相断电,C 相通电,同理
转子齿就和 C 相定子齿对齐,转子又顺时针方向旋转 30° (见图 1-2(c))。可见,
通电顺序为 A—B—C—A 时,转子便按顺时针方向一步一步转动。每换接一次,
则转子前进一个步距角。电流换接三次,磁场旋转一周,转子前进 1 个齿距角(此
例中转子有 4 个齿时为 90°)。
(a)A 相绕组通电 (b)B 相绕组通电 (c)C 相绕组通电
图 1-2 单三拍通电方式时转子的位置
欲改变旋转方向,则只要改变通电顺序即可。例如,通电顺序改为 A—C—B—
A,转子就反向转动。
2. 通电方式
步进电动机的转速既取决于控制绕组通电的频率,也取决于绕组通电方式,
三相步进电动机一般有单三拍、单双六拍及双三拍等通电方式,“单”“双”“拍”
的意思是:“单”是指每次切换前后只有一相绕组通电,“双”就是指每次有
两相绕组通电,而从一种通电状态转换到另一种通电状态就叫做一“拍”。步
进电动机若按 A—B—C—A 方式通电,因为定子绕组为三相,每一次只有一相
绕组通电,而每一个循环只有三次通电,故称为三相单三拍通电,如果按照 A—
AB—B—BC—C—CA—A 的方式循环通电,就称为三相六拍通电,如图 1-3 所示。
从该图可以看出:当 A 和 B 两相同时通电时,转子稳定位置将会停留在 A、B
两定子磁极对称的中心位置上。因为每一拍,转子转过一个步距角,由图 1-3 可
明显看出:三相三拍步距角为 30°;三相六拍步距角为 15°,上述步距角显然太大,
不符合一般用途的要求。
·25·