
Page 218 - 机械设计制造与自动化技术研究
P. 218
Research on Mechanical Design, Manufacturing and Automation Technology
机械设计制造与自动化技术研究
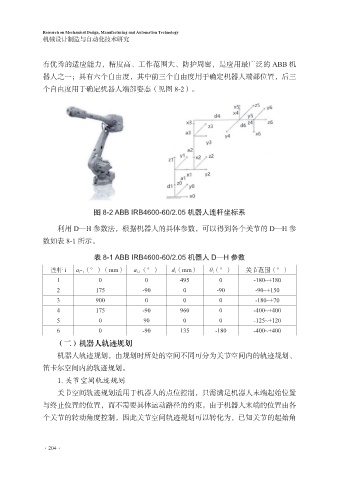
有优秀的适应能力,精度高、工作范围大、防护周密,是应用最广泛的 ABB 机
器人之一;具有六个自由度,其中前三个自由度用于确定机器人端部位置,后三
个自由度用于确定机器人端部姿态(见图 8-2)。
图 8-2 ABB IRB4600-60/2.05 机器人连杆坐标系
利用 D—H 参数法,根据机器人的具体参数,可以得到各个关节的 D—H 参
数如表 8-1 所示。
表 8-1 ABB IRB4600-60/2.05 机器人 D—H 参数
连杆 i a i - 1 (°)(mm) a i-1 (°) d i (mm) θ i (°) 关节范围(°)
1 0 0 495 0 -180~+180
2 175 -90 0 -90 -90~+150
3 900 0 0 0 -180~+70
4 175 -90 960 0 -400~+400
5 0 90 0 0 -125~+120
6 0 -90 135 -180 -400~+400
(二)机器人轨迹规划
机器人轨迹规划,由规划时所处的空间不同可分为关节空间内的轨迹规划、
笛卡尔空间内的轨迹规划。
1. 关节空间轨迹规划
关节空间轨迹规划适用于机器人的点位控制,只需满足机器人末端起始位置
与终止位置的位置,而不需要具体运动路径的约束。由于机器人末端的位置由各
个关节的转动角度控制,因此关节空间轨迹规划可以转化为,已知关节的起始角
·204·