
Page 217 - 机械设计制造与自动化技术研究
P. 217
第八章 云制造背景下工业机器人技术研究
进一步提高系统的性能。客户端在浏览器上实现,可以有效实现系统的即时访问,
减少本地操作的不便。
第三节 机器人运动虚拟设计实现
一、机器人运动学轨迹规划
(一)机器人的 D—H 参数
1. D—H 参数简介
D—H 参数法于 1955 年由迪纳维特与哈坦伯格两人提出,是目前应用最广
泛的机器人关节运动问题求解方法(见图 8-1)。
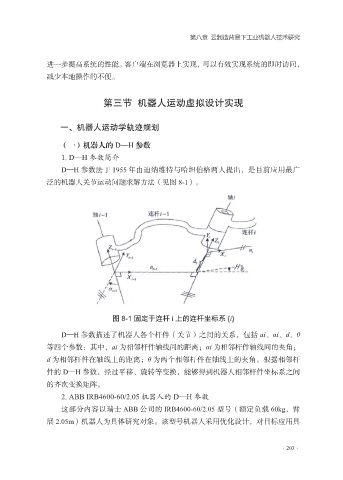
图 8-1 固定于连杆 i 上的连杆坐标系 {i}
D—H 参数描述了机器人各个杆件(关节)之间的关系,包括 ai、αi、d、θ
等四个参数:其中,ai 为相邻杆件轴线间的距离;αi 为相邻杆件轴线间的夹角;
d 为相邻杆件在轴线上的距离;θ 为两个相邻杆件在轴线上的夹角。根据相邻杆
件的 D—H 参数,经过平移、旋转等变换,能够得到机器人相邻杆件坐标系之间
的齐次变换矩阵。
2. ABB IRB4600-60/2.05 机器人的 D—H 参数
这部分内容以瑞士 ABB 公司的 IRB4600-60/2.05 型号(额定负载 60kg,臂
展 2.05m)机器人为具体研究对象。该型号机器人采用优化设计,对目标应用具
·203·