
Page 221 - 机械设计制造与自动化技术研究
P. 221
第八章 云制造背景下工业机器人技术研究
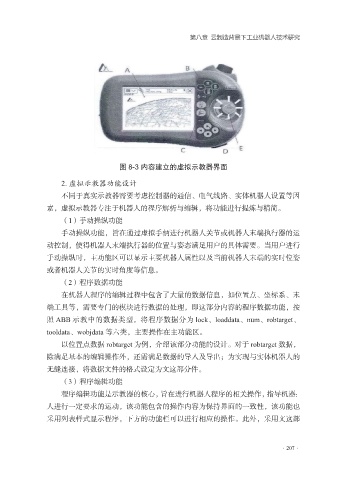
图 8-3 内容建立的虚拟示教器界面
2. 虚拟示教器功能设计
不同于真实示教器需要考虑控制器的通信、电气线路、实体机器人设置等因
素,虚拟示教器专注于机器人的程序解析与编辑,将功能进行提炼与精简。
(1)手动操纵功能
手动操纵功能,旨在通过虚拟手柄进行机器人关节或机器人末端执行器的运
动控制,使得机器人末端执行器的位置与姿态满足用户的具体需要。当用户进行
手动操纵时,主功能区可以显示主要机器人属性以及当前机器人末端的实时位姿
或者机器人关节的实时角度等信息。
(2)程序数据功能
在机器人程序的编辑过程中包含了大量的数据信息,如位置点、坐标系、末
端工具等,需要专门的模块进行数据的处理,即这部分内容的程序数据功能,按
照 ABB 示教中的数据类型,将程序数据分为 lock、loaddata、num、robtarget、
tooldata、wobjdata 等六类,主要操作在主功能区。
以位置点数据 robtarget 为例,介绍该部分功能的设计。对于 robtarget 数据,
除满足基本的编辑操作外,还需满足数据的导入及导出;为实现与实体机器人的
无缝连接,将数据文件的格式设定为文这部分件。
(3)程序编辑功能
程序编辑功能是示教器的核心,旨在进行机器人程序的相关操作,指导机器:
人进行一定要求的运动,该功能包含的操作内容为保持界面的一致性,该功能也
采用列表样式显示程序,下方的功能栏可以进行相应的操作。此外,采用文这部
·207·