
Page 178 - 数学建模算法与应用
P. 178
Mathematical Modeling Algorithms and Applications
数学建模算法与应用
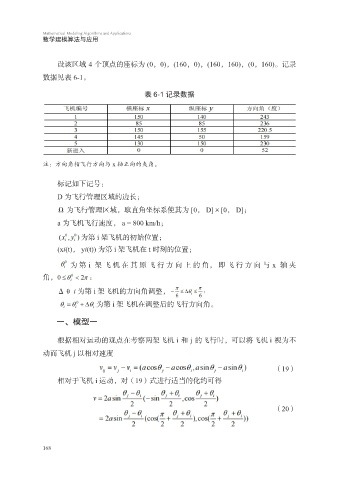
设该区域 4 个顶点的座标为 (0,0),(160,0),(160,160),(0,160)。记录
数据见表 6-1。
表 6-1 记录数据
注:方向角指飞行方向与 x 轴正向的夹角。
标记如下记号:
D 为飞行管理区域的边长;
Ω 为飞行管理区域,取直角坐标系使其为 [0, D]×[0, D];
a 为飞机飞行速度, a = 800 km/h;
为第 i 架飞机的初始位置;
(xi(t), yi(t)) 为第 i 架飞机在 t 时刻的位置;
为第 i 架飞机在其原飞行方向上的角,即飞行方向与 x 轴夹
角,
Δθ i 为第 i 架飞机的方向角调整,
为第 i 架飞机在调整后的飞行方向角。
一、模型一
根据相对运动的观点在考察两架飞机 i 和 j 的飞行时,可以将飞机 i 视为不
动而飞机 j 以相对速度
(19)
相对于飞机 i 运动,对(19)式进行适当的化约可得
(20)
168