
Page 60 - 当代控制理论及应用技术概论
P. 60
当代控制理论及应用技术概论
Introduction to Contemporary Control Theory and Applied Technology
学控制技术是将生物学的智能和控制方式应用于航天飞行器的控制系统中,从而
实现对航天飞行器的智能化控制和自适应调节。例如,仿生学控制技术可以通过
模拟生物运动中的神经元活动和神经网络结构,实现对航天飞行器的自适应控制
和姿态调整。
第二节 飞行器控制系统设计
一、飞行控制系统的原理
飞行控制系统的原理是通过将不同的控制量进行协调和控制来保证飞机稳
定飞行。这些控制量包括姿态、速度、高度等。现代飞行控制系统的工作原理基
于内置的计算机和传感器。飞行控制系统的目标是将飞机保持在良好的飞行状态,
同时还必须考虑落地、轮胎和刹车的问题,以及其他任何可能影响飞行的因素。
在飞行控制系统中,有两个基本的控制方式:开环控制和闭环控制。开环
控制是指飞机飞行时仅仅根据输入的控制信息来调整飞机的飞行姿态,而不关心
飞机当前的状态是否符合预期。闭环控制比开环控制更为高级,它会根据飞机状
态发出反馈信号来进一步调整飞机的飞行姿态。
(一)开环控制
开环控制是指无反馈信息的系统控制方式。当操作者启动系统,使之进入
运行状态后,系统将操作者的指令一次性输向受控对象。此后,操作者对受控对
象的变化便不能作进一步的控制。采用开环控制设计的人机系统,操作指令的设
计十分重要,一旦出错,将产生无法挽回的损失。
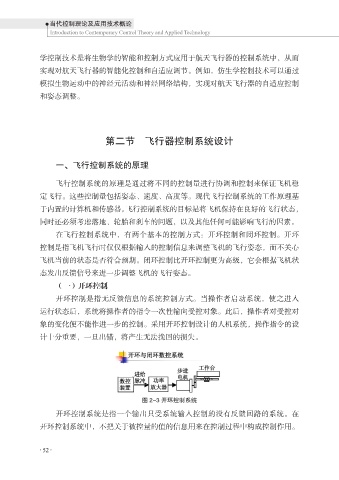
图 2-3 开环控制系统
开环控制系统是指一个输出只受系统输入控制的没有反馈回路的系统。在
开环控制系统中,不把关于被控量的值的信息用来在控制过程中构成控制作用。
52
52