
Page 62 - 当代控制理论及应用技术概论
P. 62
当代控制理论及应用技术概论
Introduction to Contemporary Control Theory and Applied Technology
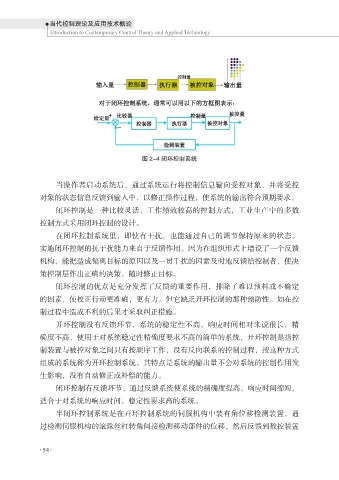
图 2-4 闭环控制系统
当操作者启动系统后,通过系统运行将控制信息输向受控对象,并将受控
对象的状态信息反馈到输入中,以修正操作过程,使系统的输出符合预期要求。
闭环控制是一种比较灵活、工作绩效较高的控制方式,工业生产中的多数
控制方式采用闭环控制的设计。
在闭环控制系统里,即使有干扰,也能通过自己的调节保持原来的状态。
实施闭环控制的抗干扰能力来自于反馈作用。因为在组织形式上增设了一个反馈
机构,能把造成偏离目标的原因以及一贯干扰的因素及时地反馈给控制者,使决
策控制层作出正确的决策,随时修正目标。
闭环控制的优点是充分发挥了反馈的重要作用,排除了难以预料或不确定
的因素,使校正行动更准确,更有力。但它缺乏开环控制的那种预防性。如在控
制过程中造成不利的后果才采取纠正措施。
开环控制没有反馈环节,系统的稳定性不高,响应时间相对来说很长,精
确度不高,使用于对系统稳定性精确度要求不高的简单的系统,开环控制是指控
制装置与被控对象之间只有按顺序工作,没有反向联系的控制过程,按这种方式
组成的系统称为开环控制系统,其特点是系统的输出量不会对系统的控制作用发
生影响,没有自动修正或补偿的能力。
闭环控制有反馈环节,通过反馈系统使系统的精确度提高,响应时间缩短,
适合于对系统的响应时间,稳定性要求高的系统。
半闭环控制系统是在开环控制系统的伺服机构中装有角位移检测装置,通
过检测伺服机构的滚珠丝杠转角间接检测移动部件的位移,然后反馈到数控装置
54
54