
Page 91 - 工业机器人控制技术研究
P. 91
第三章 工业机器人的控制系统
而产生了若干的不稳定性问题。因此在未来的发展过程中,优化工业机器人的设
计方案,并将其投料装置应用在自动化生产线上,不断地进行调整。和自动化生
产线的结合力度越强,也能够保证自身的精度越高,才能够适用于更多复杂的场
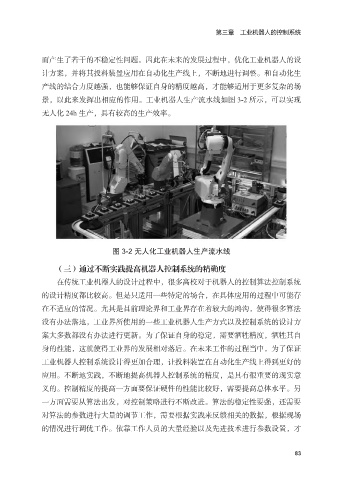
景,以此来发挥出相应的作用。工业机器人生产流水线如图 3-2 所示,可以实现
无人化 24h 生产,具有较高的生产效率。
图 3-2 无人化工业机器人生产流水线
(三)通过不断实践提高机器人控制系统的精确度
在传统工业机器人的设计过程中,很多高校对于机器人的控制算法控制系统
的设计精度都比较高。但是只适用一些特定的场合,在具体应用的过程中可能存
在不适应的情况。尤其是目前理论界和工业界存在着较大的鸿沟,使得很多算法
没有办法落地,工业界所使用的一些工业机器人生产方式以及控制系统的设计方
案大多数都没有办法进行更新。为了保证自身的稳定,需要牺牲精度,牺牲其自
身的性能,这就使得工业界的发展相对落后。在未来工作的过程当中,为了保证
工业机器人控制系统设计得更加合理,让投料装置在自动化生产线上得到更好的
应用。不断地实践,不断地提高机器人控制系统的精度,是具有很重要的现实意
义的。控制精度的提高一方面要保证硬件的性能比较好,需要提高总体水平。另
一方面需要从算法出发,对控制策略进行不断改进。算法的稳定性要强,还需要
对算法的参数进行大量的调节工作,需要根据实践来反馈相关的数据,根据现场
的情况进行调优工作。依靠工作人员的大量经验以及先进技术进行参数设置,才
83