
Page 44 - 电气自动化下电力生产技术及安全管理
P. 44
电气自动化下电力生产技术及安全管理
控制器 Q 1 置于上升位置 1,电动机 M 1 定子接入上升相序的电源,转子接入全部电
阻,起动力矩较小,可用来张紧钢丝绳,在轻载时也可提升负载,如图 2-6 上第一象限
特性曲线 1 所示。控制器 Q 1 操作手柄置于上升位置 2,转子电阻被短接一部分,电动机
工作于特性曲 2,随着操作手柄置于位置 3、4、5 时,电动机转子电阻逐渐减小至 0,运
行状态随之发生变化,在提升重物时速度逐级提高,如 A1、A2、A3、A4、A5 等工作点
所示。如需以极低的速度提升重物,可采用点动断续操作,方法是将操作手柄往返扳动
在提升与零位之间,使电动机工作在正向起动与机械抱闸制动交替进行的点动状态。
吊钩及重物下降有三种方法:空钩或工件很轻时,提升机构的总负载主要是摩擦转
矩 (反抗性负载),可将 Q1 放在下降位置 1~5 挡,电动机工作在第三象限反向电动状
态,空钩或工件被强迫下降,如图上 B1~B5 等工作点所示。当工件较重时,可将 Q1 放
在上升位置 1,电动机工作在第四象限的倒拉制动状态,工件以低速下降,其工作点为
C 点。还可将 Q1 由零位迅速通过下降位置 1~4 扳至第 5 挡,此时电动机转子外接电阻
全部短接,电动机工作在第四象限的回馈制动状态,其转速高于同步转速,工作点如
D5 所示。如将手柄停留在 1~4 挡,则转子电阻未能全部短接,相应工作点为 D1~D4,
电动机转速很高,导致重物迅速下降,可能危及电动机和现场操作人员安全。如需低速
点动下放重物,亦可采用类同正向低速点动提升重物的操作方法。
第三,小车移行机构要求以 40~60m/min 的速度在主梁轨道上作往返运行,转子采
用串电阻起动和调速,共有 5 挡。为实现准确停车,也采用机械抱闸制动器制动。其凸
轮控制器 Q2 的原理和接线与提升机构的控制器 Q1 相类似。
第四,大车运行机构要求以 100~135m/min 的速度沿车间长度方向轨道作往返运行。
大车采用两台电动机及减速和制动机构进行分别驱动,凸轮控制器 Q3 同时采用两组各
5 对触头分别控制电动机 M3、M4 转子各 5 级电阻的短接与投入。其他与提升机构的控
制器 Q1 相类似。
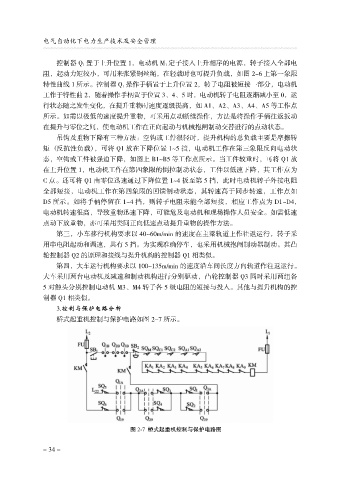
3.控制与保护电路分析
桥式起重机控制与保护电路如图 2-7 所示。
图 2-7 桥式起重机控制与保护电路图
- 34 -