
Page 202 - 测绘新技术的理论与实践研究
P. 202
测绘新技术的理论与实践研究
-3° ~15°范围内)增加,机翼升力明显增加,阻力也一定程度增加。说明雷诺
数较大时,升阻比大小和机翼安全迎角范围一般,无干扰情况下能正常飞行,较
容易出现危险状况。
③雷诺数 ≥1100000,机翼失速性能较好,随着机翼迎角(在 -3° ~15°范围
内)增加,机翼升力明显增加,阻力先减小后增加,机翼升力变化速率远超阻力
变化速率。说明雷诺数大时,升阻比大,机翼安全迎角范围大,飞机不容易失速,
安全性能好。
4. 巡航速度可行性分析
前面从像点位移、机翼尺寸、起飞重量、确保飞行安全等出发,求得不同航
测比例尺下最高巡航速度,并分析最低巡航速度。下面利用雷诺数相关理论,结
合大白Ⅱ飞行平台参数,论证巡航速度的可行性。
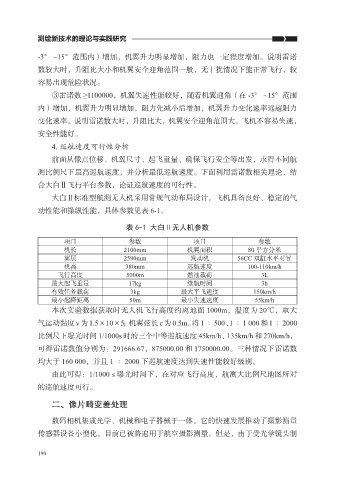
大白Ⅱ标准型航测无人机采用常规气动布局设计,飞机具备良好、稳定的气
动性能和操纵性能,具体参数见表 6-1。
表 6-1 大白Ⅱ无人机参数
项目 参数 项目 参数
机长 2100mm 机翼面积 80 平方分米
翼展 2590mm 发动机 56CC 双缸水平对置
机高 380mm 巡航速度 100-110km/h
飞行高度 5000m 燃油载荷 3L
最大起飞重量 17kg 续航时间 3h
有效任务载荷 3kg 最大平飞速度 150km/h
最小起降距离 50m 最小失速速度 55km/h
本次实验数据获取时无人机飞行高度约离地面 1000m,温度为 20℃,取大
气运动黏度 v 为 1.5×10×5;机翼弦长 c 为 0.5m。将 1 ∶ 500、1 ∶ 1 000 和 1 ∶ 2000
比例尺下曝光时间 1/1000s 时的三个中等巡航速度 45km/h、135km/h 和 270km/h,
可得雷诺数值分别为:291666.67,875000.00 和 1750000.00。三种情况下雷诺数
均大于 160 000,并且 1 ∶ 2000 下巡航速度达到失速性能较好级别。
由此可得:1/1000 s 曝光时间下,在对应飞行高度,航测大比例尺地图所对
的巡航速度可行。
二、像片畸变差处理
数码相机集成光学、机械和电子器械于一体,它的快速发展推动了摄影测量
传感器设备小型化,目前已被普遍用于航空摄影测量。但是,由于受光学镜头制
190