
Page 82 - 现代航空维修理论及应用研究
P. 82
Research on Modern Aviation Maintenance Theory and Application
现代航空维修理论及应用研究
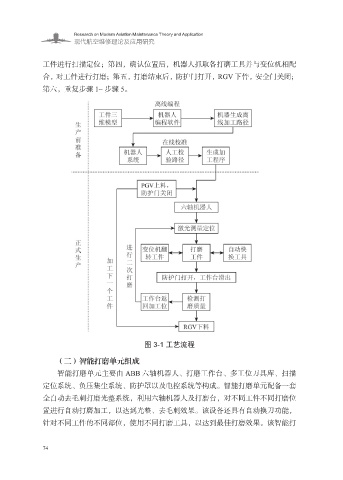
工件进行扫描定位;第四,确认位置后,机器人抓取各打磨工具并与变位机相配
合,对工件进行打磨;第五,打磨结束后,防护门打开,RGV 下件,安全门关闭;
第六,重复步骤 1~ 步骤 5。
图 3-1 工艺流程
(二)智能打磨单元组成
智能打磨单元主要由 ABB 六轴机器人、打磨工作台、多工位刀具库、扫描
定位系统、负压集尘系统、防护罩以及电控系统等构成。智能打磨单元配备一套
全自动去毛刺打磨光整系统,利用六轴机器人及打磨台,对不同工件不同打磨位
置进行自动打磨加工,以达到光整、去毛刺效果。该设备还具有自动换刀功能,
针对不同工件的不同部位,使用不同打磨工具,以达到最佳打磨效果。该智能打
74